
Concours
Un robot de l’Empa qui joue du muscle
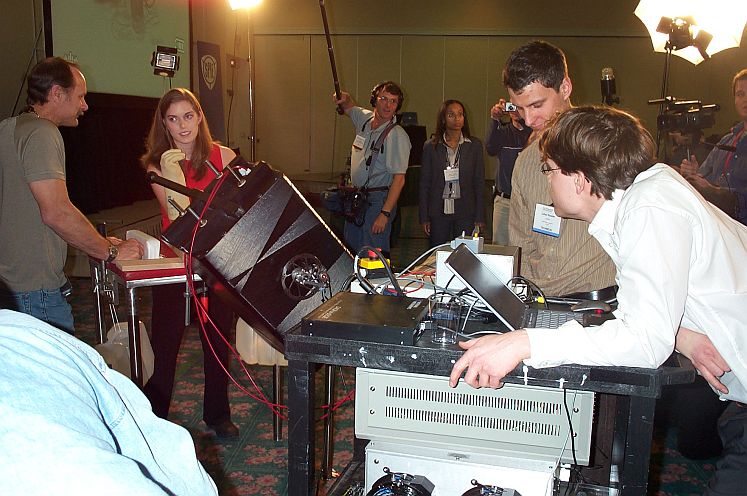
Le 7 mars 2007, l’Empa a participé à San Diego à un concours assez particulier lors duquel des robots se sont mesurés au bras de fer avec une étudiante. Le règlement du concours n’‘autorisait que des robots dont la force était produite par des polymères électroactifs. Le robot conçu et construit par l’équipe de l’Empa sous la direction de Gabor Kovacs a obtenu une deuxième place fort enviable lors de ce premier concours de bras de fer pour robots.
| Ce concours d’un genre futuriste organisé par le laboratoire mondialement connu Jet Propulsion Laboratorys de la NASA en Californie n’était aucunement un simple passe-temps amusant pour la communauté internationale des chercheurs. Son but premier était bien au contraire d’attirer l’attention de la presse et du public sur les possibilités futures des systèmes de matériaux adaptatifs lors de la «Electroactive Polymer Actuators and Devices (EPAD) Conference at SPIE's Smart Structures and Materials Symposium». Ce thème intéresse aussi l’Empa qui, dans son programme «Matériaux et systèmes adaptatifs», mène des travaux de recherche intensifs sur les capteurs, les actuateurs et leurs systèmes de commande «intelligents». Avec 27 instituts de recherche, dont des laboratoires des EPF de Zurich et de Lausanne, l’Empa fait partie d’un réseau mondial dans ce domaine.
Le muscle artificiel: basé sur le principe du condensateur électrique Le Laboratoire Résistance et technologie de l’Empa développe actuellement différents actuateurs utilisant des feuilles de polymères électroactifs (EAP). Le principe de fonctionnement de ces actuateurs repose sur celui des condensateurs. La feuille d’élastomère est revêtue sur ses deux faces d’une couche d’un matériau conducteur hautement élastique fonctionnant comme électrode. L’application d’une tension électrique entre ces deux couches crée un champ électrostatique et les forces qui en résultent contraignent la feuille à s’allonger dans un plan. Leurs propriétés mécaniques, (allongement, domaine de force, masse, etc.) confèrent à ces systèmes de matériaux EAP des caractéristiques proches de celles d’un muscle, ce qui les fait appeler aussi muscles artificiels. Pour construire leur champion de bras de fer, les chercheurs de l’Empa ont eu recours à un actuateur formé d’un ressort et de couches de polymère électroactif. Pour cela, une feuille de polymère électroactif est enroulée autour du ressort comprimé. En relâchant le ressort, la feuille se tend et si l’on applique alors une tension électrique à l’actuateur, la feuille s’allonge en direction longitudinale et permet ainsi une commande précise de la force exercée par le ressort. Sur l’actionneur du «gros bras» qui a participé au concours de bras de fer de San Diego le ressort est entouré de quarante couches de feuilles de polymère électroactif d’une épaisseur de quelques microns chacune. Tous les robots qui ont participé aux olympiades de bras de fer à San Diego ont finalement été battus par l’étudiante Panna Felsen. Le bras de l’Empa s’est classé deuxième par son temps de résistance. Contact: Dr. Gabor Kovacs, Laboratoire Résistance et technologie, Tel. +41 44 823 40 63, | ||
| ||||