
Arm-Wrestling-Wettbewerb
Empa-Roboter lässt künstliche Muskeln spielen
An einer Weltmeisterschaft der besonderen Art nahm die Empa am 7. März 2005 in San Diego teil: Roboter konnten sich im Armdrücken mit einer Studentin messen. Die Spielregeln erlaubten nur Roboter, deren Kraft von elektrisch aktivierten Polymeren (EAP) erzeugt wird. Das unter Leitung von Dr. Gabor Kovacs stehende Empa-Team erreichte im ersten „Arm-Wrestling-Roboter“-Wettbewerb den viel beachteten zweiten Rang.
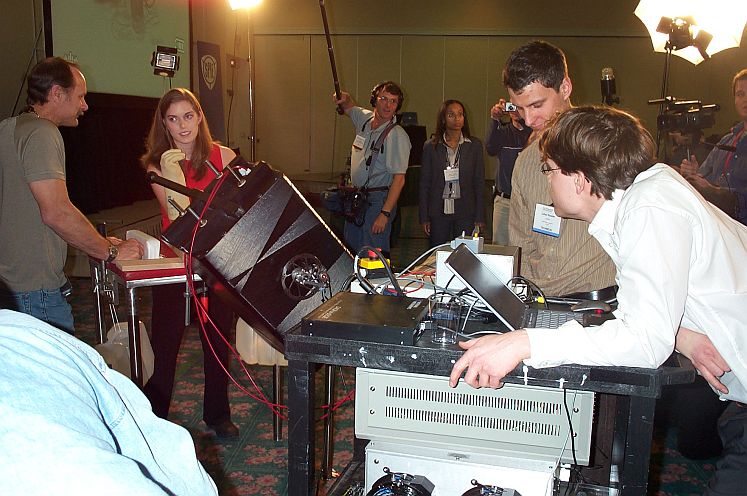
| Der futuristisch anmutende Wettbewerb des weltberühmten Jet Propulsion Laboratorys der NASA am California Institute of Technology ist keineswegs nur ein spassiger Zeitvertreib für die internationale Forschergemeinde. Vielmehr sollte anlässlich der «Electroactive Polymer Actuators and Devices (EPAD) conference at SPIE's Smart Structures and Materials Symposium» anschaulich und medienwirksam die Aufmerksamkeit der Öffentlichkeit auf die Zukunftschancen adaptiver Werkstoffsysteme gelenkt werden. Das Thema interessiert auch die Empa. Im Rahmen ihres Forschungsprogramms «Adaptive Werkstoffsysteme» befasst sie sich intensiv mit Sensoren, Aktoren und deren «intelligenter» Regelung. Sie ist Teil eines weltweiten Netzwerkes von 27 Instituten, zu welchem auch die ETH in Zürich und die EPF in Lausanne gehören.
Arm mit Kunstmuskeln: Im Prinzip ein elektrischer Kondensator An der Empa entwickelt derzeit die Abteilung Festigkeit und Technologie verschiedene Aktoren aus elektroaktiven Polymerfolien. Das Funktionsprinzip dieser Aktoren beruht auf dem Kondensatoreffekt. Die Elastomerfolie wird auf den beiden Flächen mit einem elektrisch leitfähigen und hochgradig elastischen Material als Elektrode beschichtet. Das Anlegen einer elektrischen Spannung zwischen diesen beiden Schichten erzeugt ein elektrostatisches Feld. Infolge der daraus resultierenden Kräfte wird die Elastomerfolie zwischen diesen Elektroden kontrahiert. Das inkompressible Verhalten des Elastomers zwingt die Folie zu einer entsprechenden planaren Ausdehnung. Aufgrund ihrer mechanischen Eigenschaften (Dehnung, Kraftbereich, Masse etc.) können EAP-Materialsysteme muskelähnliche Charakterzüge annehmen. Deshalb werden solche Aktoren auch als künstliche Muskeln bezeichnet. Um ihren Armwrestling-Kandidaten zu bauen, griffen die Empa-Forscher zu einem Aktorsystem, das aus einer Druckfeder und elektroaktiven Schichten besteht. Eine beschichtete Folie wurde um eine zusammengedrückte Feder gewickelt und an den Enden fixiert. Beim Loslassen der Feder entspannt sich die Feder partiell, und die aufgewickelte Folie wird dabei in Längsrichtung gespannt. Wird nun eine elektrische Spannung an den Aktor gelegt, dehnt sich die Folie in Längsrichtung weiter aus und ermöglicht dadurch eine präzise regelbare Kraftausübung der Feder. Für den Aktor des Kraftprotzes, mit dem die Empa am Armwrestling-Wettbewerb in San Diego teilnahm, ist die Druckfeder mit einem System aus vierzig Schichten mikrometerdünner elektroaktiver Polymerfolien umhüllt. Alle Roboter, die zur Armrestling-Olympiade in San Diego angetreten waren, unterlagen im Wettbewerb: Beim Wettdrücken mussten sie allesamt dem Kräfteeinsatz der Schülerin Panna Felsen weichen. Der Empa-Arm hielt im Vergleich zu den anderen Robotern am zweitlängsten durch. Kontakt: Dr. Gabor Kovacs, Abt. Materials and Engineering, Tel. +41 44 823 40 63, | ||
| ||||