Laboratory for Mechanical Systems Engineering
The Laboratory for „Mechanical Systems Engineering“ focuses on research and development in the field of engineering, studying in particular metallic materials, polymers, polymer-matrix composites and sandwich materials.
Our research focus areas are
Biomedical Engineering
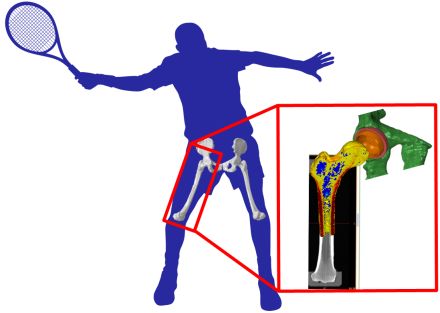
The core activity is the development of biomedical products. On one hand, experimental investigations are performed, which partly require the design and construction of test simulators to evaluate the load-ing capacity and the wearout of biomaterials, implants and artificial joints. On the other hand, computer simulations of new artificial limb designs as well as of the human musculoskeletal system are carried out. For further details consult Flyer Biomedical Engineering.

Structural Mechanics
Within the scope of this field, static material and component tests as well as failure analyses are carried out. The latter include stress analysis (with the aid of FEM) as well as measurements of mechanical characteristics. Moreover, we perform standard certification tests of components, such as e.g. reinforcing steels, (steel meshes, rebars- and rebar-based products) prestressing steels (steel strands/wires, connectors) and tensioning and anchor systems. Our certification activities are centered around the quality control of steel manufacturers, in Switzerland and abroad, and on their products with the respective tests from active Swiss and European con-struction standards.
Structural Durability
This research area looks into questions of safety, reliability, durability and service lifetime of materials, components and entire structures. These represent main market criteria for developing products and their components. The activities focus on metals, polymers, polymer matrix composites and their combinations.

Composites
The activities in the area of composites, sandwich materials and polymers comprise research and de-velopment, failure analysis, consulting, modelling, and services.
Aims of these activities are improving the application and performance of these materials in the engi-neering industry, traffic and transportation, aviation and space as well as in civil engineering.
Empa’s Laboratory for Mechanical Systems Engineering was a specialised partner of Bertrand Piccard’s challenging project Solar Impulse, which was successfully flying an extremely lightweight, solar-driven composite airplane around the world. The laboratory’s task was to assist Solar Impulse with the exper-imental characterisation of the mechanical properties of specific CFRP laminates and components.
The core of the research and development activities of the Laboratory for Mechanical Systems Engi-neering is within the scope of Empa's research focus areas „Health and Performance”, “Sustainable Built Environment” and “Nanostructured Materials".
Our services for industry and institutions are
-
Failure, reliability and safety analyses
- Characterization of materials, components and systems (statically, cyclic fatigue with constant and vari-able amplitudes, impact) – certified testing laboratory STS0053 (SN EN ISO/IEC 17025 2018-01 General requirements for the competence of testing and calibration laboratories)
- Numerical simulation (Finite Element method, multi body simulation)
- Durability verification and service life estimation
- Testing and certification of construction and building products, accredited certification laboratory SCESp0022 (SN EN ISO/IEC 17065:2013 Conformity assessment - Requirements for bodies certifying products, processes and services (ISO/IEC 17065:2012))
- Consulting, planning and engineering
- Testing equipment
Contact
Head of Laboratory: Prof. Dr. Giovanni Terrasi
Deputy Head of Laboratory: Bernhard Weisse
Assistant: Evelyne Aerne
E-mail:
Fax: +41 (0)58 765 69 11
